
Description
MZ25 General Specifications
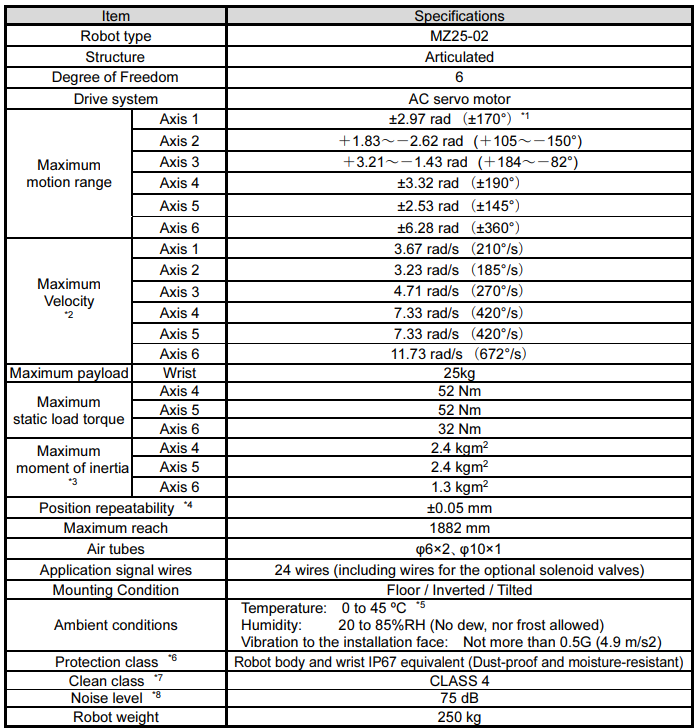
1[rad] = 180/π[°], 1[N・m] = 1/9.8[kgf・m]
– Axis 1 – Axis 6 are displayed as J1-J6 each on the controller screen.
– Specifications are subject to change without prior notice for technical changes.
– Explosion-proof version is not available.
*1: Can be expanded to ±180° by option. *2: The maximum velocity in the chart is the maximum value. It will change depending on the operation program and the wrist load condition. *3: Maximum moment of inertia of a wrist changes depending on the load
condition. *4: JIS B 8432 conformance. *5: Using at 1000m or lower sea level. Ambient temperature has limitations when allowable altitude is exceeded. *6: Liquid such as organic compound, acidity, alkalinity, chlorine or gasoline cutting fluid which deteriorates the seal material is not available to use. The wire-harness portion is IP65 equivalent, and FD20/FD18/FD11 and TFD14C controller are IP54 equivalent. Please refer to the next page supplement. When option OP-P6-016/-017 (axis 2 encoder connector protector) is selected, IP67 equivalent is down to IP54 equivalent. *7: This is based on an internal assessment in accordance with ISO 14644-1. To ensure cleanliness, install in a clean room with downflow. Robot is not packaged in dust-proof, so when bringing in a clean room, it is necessary to remove dust and dust from robot and wipe clean. *8: Robot noise is A-weighted equivalent sound level measured under “JIS Z 8737-1” (ISO 11201) with maximum payload and maximum velocity.
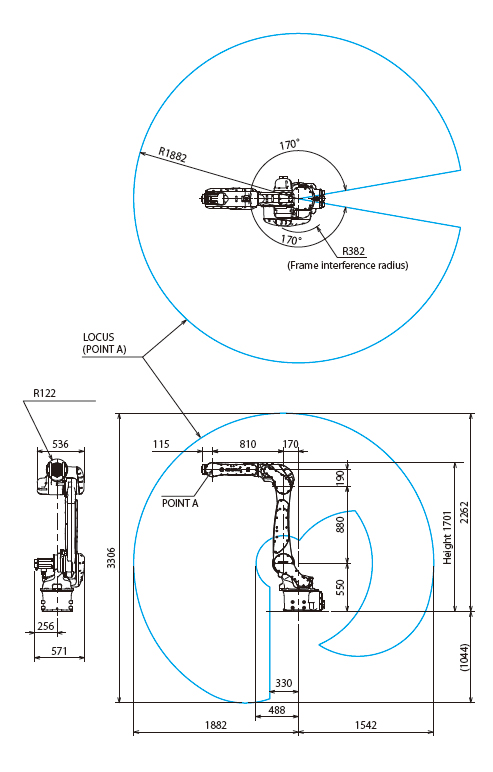
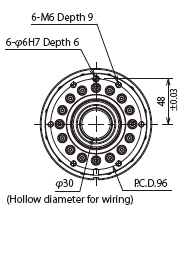
MZ25 Robot Dimensions and Working Envelope
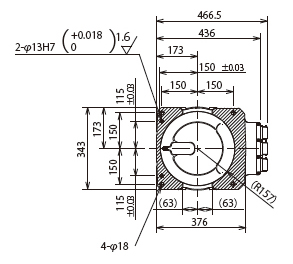
Baseplate Mounting Information and Robot Footprint
Application Example
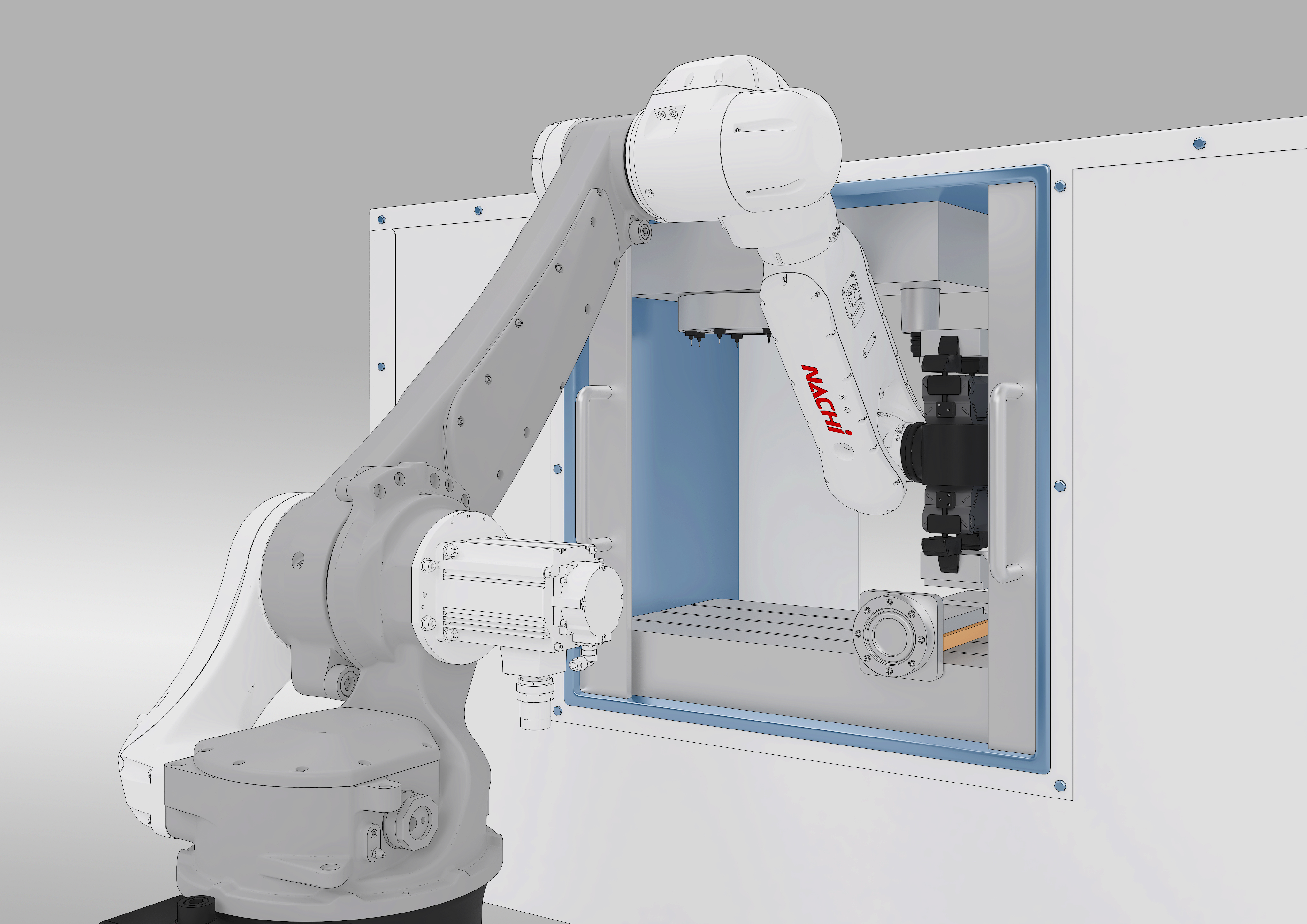
Machine loading
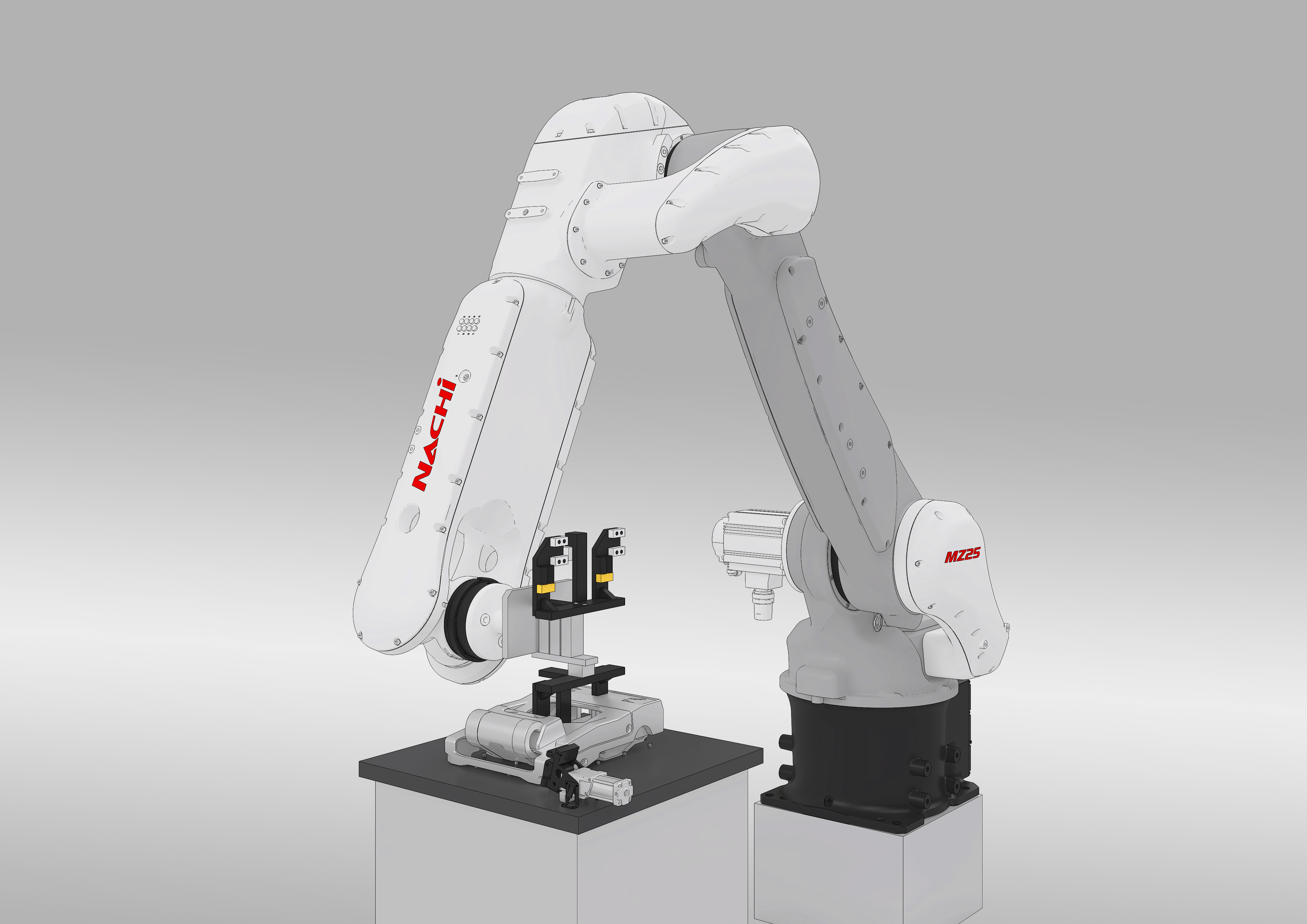
Mounting
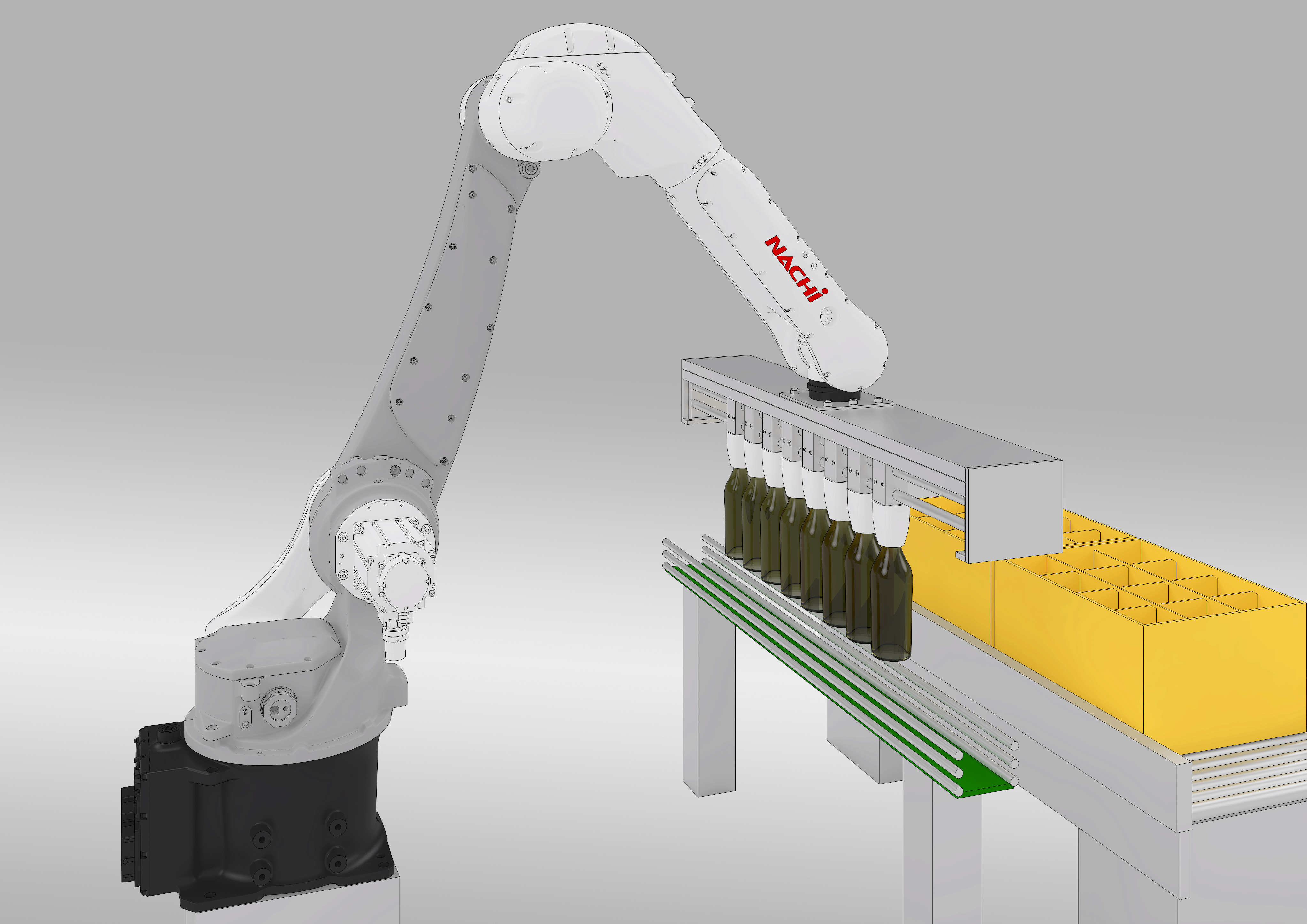
Picking
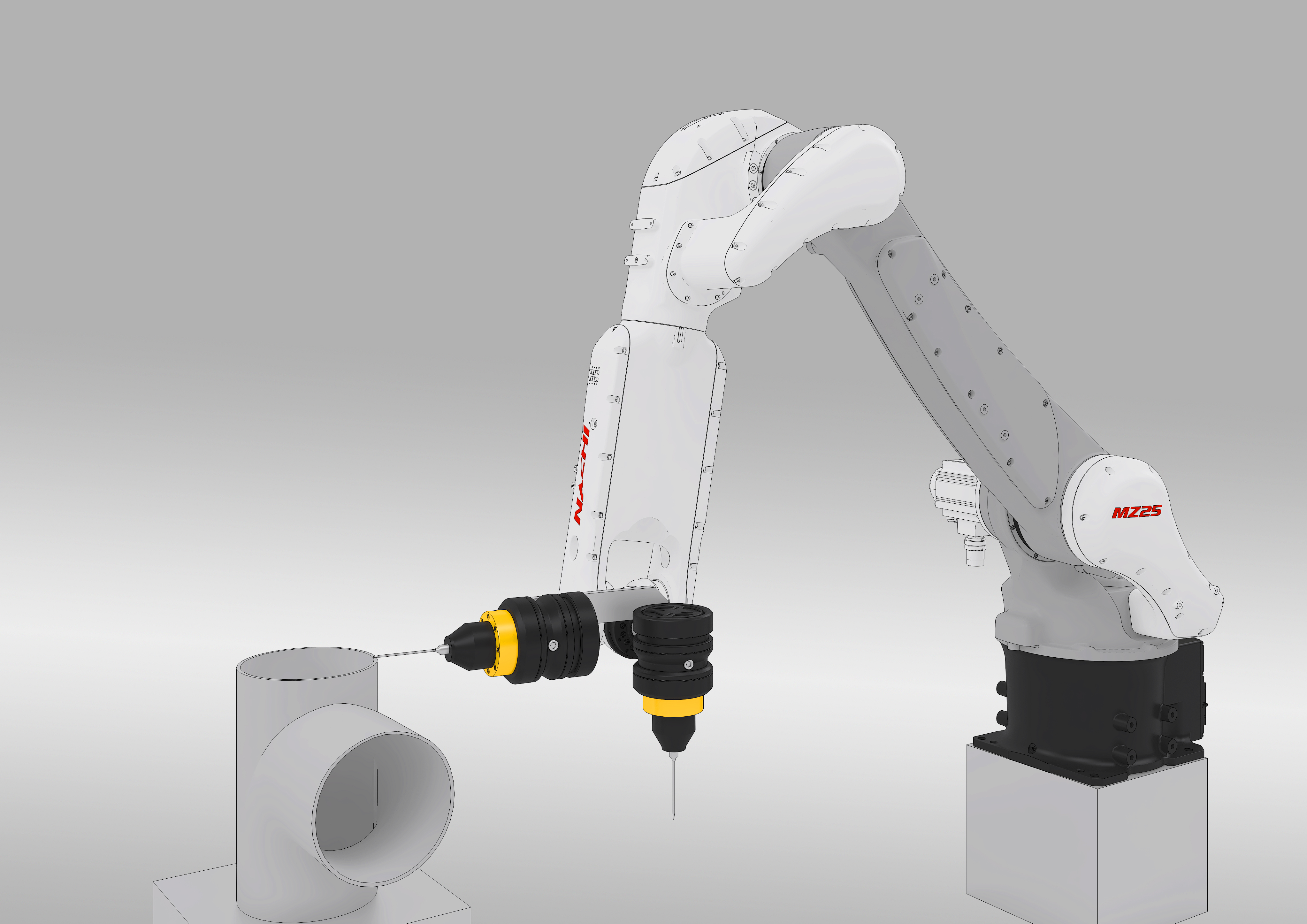
Deburring


